Úvodem:
Začátkem května 2013 jsem poprvé začal experimentovat s poletuchami bez křídel. Výsledkem mého snažení byla trikoptéra postavená podle podkladů na webu rcexplorer.se. Srdcem této trikoptéry byla ovládací deska KK 2.0. Časem mi ale možnosti této desky přestávaly stačit. Navíc tahle koptéra svým výkonem nezvládala dost dobře nosit těžší výbavu na natáčení ze vzduchu. Každopádně jsem si s ní užil hodně legrace a pořídil jsem i pár zkušebních video záznamů.
Postupně se čím dál tím více začalo projevovat, že na serioznější a snad i bezpečnější natáčení bude potřeba vyspělejší ovládací elektronika (řídící deska). A když už lepší deska tak i lepší stroj. Výsledkem tohoto vývoje byl přechod na kvadrokoptéru vybavenou řídící deskou Arduflyer verze 2.5. Tato deska, kromě spousty uživatelských nastavení, umožňuje také využívat GPS, kompas (to v základní výbavě). S rozšířením pak i sonar a další příjemné maličkosti. Deska komunikuje s PC ať už po kabelu USB nebo dálkově v pásmu 433MHz. Z PC je pak možno jak programovat vlastní desku, tak třeba i sledovat koptéru v letu přímo online na mapě včetně letových údajů – rychlost, výška, směr apod. Let koptéry lze i dopředu naprogramovat – jednoduše řečeno nastaví se body kudy má stroj proletět a on jimi proletí. Hned ale dodám, že zatím všech vymožeností nastavení a výbavy desky nevyužívám, aneb jsem na začátku ....
Takže zpět k předmětu článku:
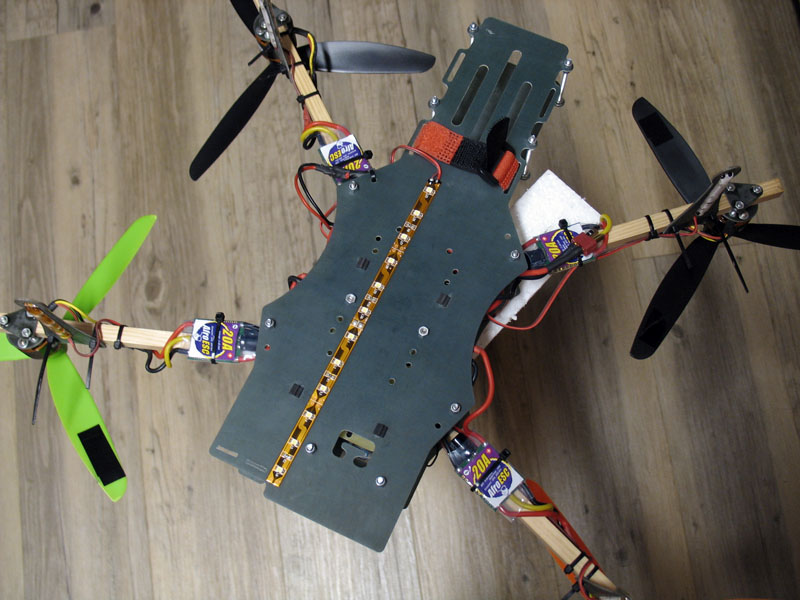
Existuje partička, která si říká „Team BlackSheep“. Je to skupina nadšenců, která se opravdu hodně intenzívně věnuje létání FPV (first person view) a natáčení videí ze vzduchu. A tahle parta vymyslela kvadrokoptéru specifického tvaru, víceméně speciálně určenou právě pro natáčení videí. Specifičnost spočívá v tom, že dvě přední ramena jsou rozevřena více než zadní a vpředu umístěná kamera tak nemá v záběru přední motory. U klasických kvadrokoptér právě přední motory s točícími se vrtulemi natočené video dost ruší.
Takovou kvadrokoptéru si lze od zmíněných TBS koupit. Ceny začínají na $74.75 jen za holou „kostru“ bez ramen pro motory, bez elektroniky a dalšího vybavení a končí na $2,549.95 za komplet se vším potřebným jak pro stavbu, tak pro provoz a létání. Nutno dodat, že za vyšší z uvedených cen dostanete opravdu vše vč. vysílače, elektroniky, zařízení pro přenos obrazu z koptéry do brýlí (FPV), kamery atd. Prostě všechno! Stačí jen rozbít prasátko :)
Jako příznivce kutilských řešení jsem se ale touto lákavou nabídkou nenechal ovlivnit a pustil se do vlastní tvorby.
| Základní parametry: | |
| délka (bez vrtulí) | 320mm |
| šířka (bez vrtulí) | 470mm |
| hmotnost draku | 857g (aktuálně s plastovými rameny, gimbalem, kamerou a plastovými nožkami 1300g) |
| hmotnost - ostatní | baterie LiPol 3S1P2200mAh 185g, fotoaparát Canon 352g, když se letí s foťákem tak osazuji dvě baterie takže letová hmotnost komplet 857+2x185+352=1579g ... a je to celkem pohoda |
| ovládané funkce | jako letadlo křidélka - klopení do stran, výškovka - klopení dopředu / dozadu, směrovka - otáčení kolem svislé osy, motor - stoupání / klesání |
| přijímač | JETI 8-kanál 35MHz |
| regulátory | AFRO ESC 20A |
| baterie | 3S1P2200mAh samotná, nebo dva kusy takže 3S2P2200mAh (Turnigy) |
| motory | 2830-12, 980kV |
| elektronika (ovládací deska) | Arduflyer 2.5 |
Stavba:
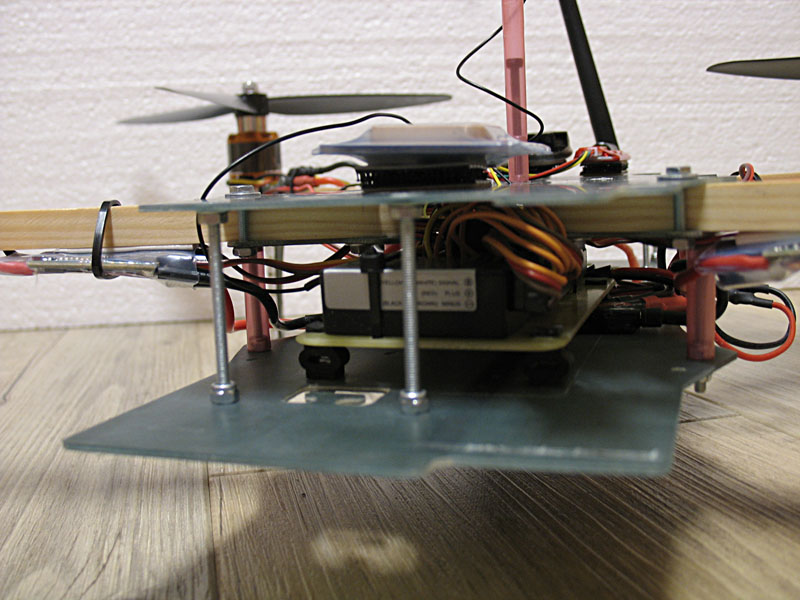
Základem kostry koptéry jsou dvě desky vyfrézované ze sklotextitu tl. 1,5mm. Tvar desek vychází z tvaru TBS (proto v názvu ten TBS clone). Při zahájení stavby jsem neměl plastová ramena SM450, která se sice dají koupit, ale také se dají nahradit. Jako náhradu jsem použil obyčejné smrkové latě 10x10mm. Dřevo, na rozdíl od plastu, má ještě tu výhodu, že dokáže lépe tlumit vibrace, které zkrátka točící se motory vytvářejí. Desky jsou propojeny dlouhými šrouby s maticemi M3. Ramena z lišt jsou přišroubována k horní desce. Na konce dř. ramen jsou upevněna lože pro motory – opět díly frézované ze sklotextitu tl. 1,5mm. Před motory jsou pomocí plastových stahovacích pásků na ramena připevněny „nožky“, sklotextit 1,5mm. Díly jsou spojeny šrouby, motory jsou přišroubovány, ostatní vybavení je na kostru uchyceno buď stahovacími plastovými pásky nebo pomocí suchého zipu. Deska elektroniky, výše zmiňovaná Arduflyer, je společně s přijímačem uložena na samostatné sklotextitové destičce, která je přes pryžové silentbloky (vyrabované z CDrom mechaniky) připevněna ke spodní desce kostry.
A to je k mechanické části vše :)
Elektronika:
Elektronika téměř výhradně čínské provenience sestává ze čtyř motorů s kV 980ot/V s regulátory 20A Afro ESC, ovládací desky Arduflyer 2.5 doplněné externí GPS a vysílačem telemetrie a 8-kanálového přijímače JeTi (35MHz) ze šuplíkových zásob, jediný český výrobek.
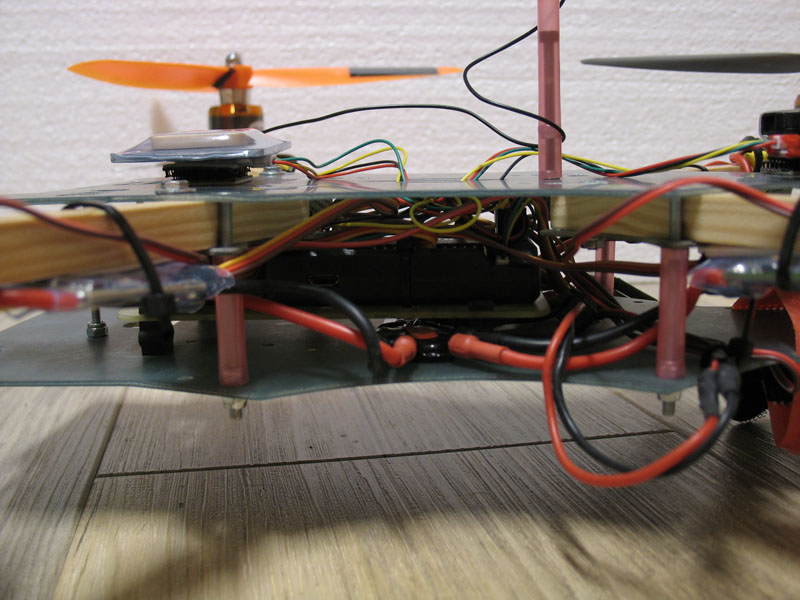
Přijímač a deska elektroniky Ardulflyer jsou umístěny mezi dvě hlavní plata a jsou stahovacími plastovými pásky připevněny k samostatné sklotextitové destičce, která je kvůli omezení přenosů vibrací do elektroniky uložena přes 4 pryžové silentbloky na spodní plato. Toto umístění jsem zvolil hlavně kvůli ochraně elektroniky před případnými karamboly a následnému poškození. Na horním platu shora jsou externí GPS, vysílač telemetrie a hlídač poklesu napětí článků pohonné baterie. Regulátory jsou stahovacími plastovými pásky připevněny k dřevěným ramenům. Pro připojení regulátorů k napájecímu napětí je na spodním platu umístěna rozvodná deska s konektory. V případě potřeby rozebrání koptéry tak stačí jen napájecí kablíky regulátorů vytahat z konektorů.
Na motory jsou osazeny plastové třílisté vrtule 9/4,5. Lze použít i vrtule menší, např. dvoulisté nebo třílisté 8/4,5 ovšem za cenu významného snížení nosnosti koptéry. Osobně se mi větší vrtule osvědčily více. Navíc menší dvoulisté 8/4,5 bylo nemožné vyvážit a vibrace od vrtulí byly opravdu výrazné.
Arduflyer 2.5:
Proč zrovna tahle elektronika? Existuje spousta zařízení podobného typu s podobnými funkcemi. Etalonem kvality a spolehlivosti je asi v současné době elektronika Naza. Řídící jednotku Naza M V2 s GPS modulem lze pořídit za cca 10.490Kč. Arduflyer je funkčností srovnatelný, v některých parametrech možná i lepší (víte jak to je, vše má své silné i slabší stránky, takže to prosím berte s rezervou). Arduflyer je open source systém založený na procesoru ATmega2560 což mu dává nezanedbatelný potenciál na další a další vylepšení/programování.
Komplet srovnatelný s výše uvedenou sestavou Naza se dá pořídit za cca $110, vč. telemetrického modulu pro přenos dat mezi koptérou a PC pak za $150. Jednoduchým přepočtem je zřejmý jeden z důvodů pro volbu této elektroniky :)
Další důležitou okolností jsou ale také velmi pozitivní zkušenosti uživatelů této desky. Zkrátka za rozumné peníze hodně muziky. Na druhé straně volba Arduflyer obnáší nutnost alespoň základní uživatelské znalosti práce s PC a také schopnost přiletovat k desce konektory (upřímně, zapomeňte na známou pistolovou trafopájku 100W), což u Naza potřeba není. Jinými slovy, pokud je člověk kutil s příslušným dílenským zázemím tak je Arduflyer dobrá volba, v opačném případě sáhněte po hotovém řešení, kterým Naza bezesporu je.
Samotné nastavení desky by vydalo na knihu což ale nic nemění na skutečnosti, že základní zprovoznění desky je snadné a na internetu jsou k dispozici jak instruktážní texty tak videa (znalost angličtiny je více jak vhodná). Až ve chvíli, kdy přestanou základní možnosti desky vyhovovat (a opět, upřímně, spoustě uživatelů bude to základní nastavení plně stačit) dojde na lámání chleba, protože jednotlivá nastavení budou ve velké míře záviset jednak na potřebách uživatele a také na modelu. Ovšem i pro tento případ jsou na internetu k dispozici postupy a popisy.
Létání s kvadrokoptérou.
Zejména díky použité desce elektroniky je létání ... jak to napsat .... zkrátka takové přesnější a předvídatelnější než u předchozí trikoptéry s deskou KK 2.0. Navíc u kvadrokoptéry oproti trikoptéře odpadá nutnost řídit naklápění zadního motoru. Takže řešení je mechanicky jednodušší a i samotné naklápění motoru vnáší do ovládání drobné nepřesnosti.
Moje zkušenosti:
Věta první – není jich mnoho. Věta druhá – pořád se učím :).
Jak už jsem napsal výše let s kvadrokoptérou vybavenou řízením Arduflyer je stabilní, předvídatelný a přednastavené módy dokážou významně usnadnit některé režimy letu.
Učinil jsem už i negativní zkušenost v podobě divného chování modelu v režimu Loiter (automatický režim, kdy koptéra setrvává na místě a elektronika kompenzuje i případný snos větrem) a RTL (automatický režim návratu koptéry do místa vzletu). V obou případech se divné chování projevovalo tak, že po přepnutí na režim loiter/RTL koptéra vyrazila divoce někam pryč. Zkusil jsem přeinstalovat firmware a znovu provést všechny kalibrace a zdá se, že to pomohlo.
Fotky a video:



Aktualizace 11.2, 2014: Přeinstalování firmware nepomohlo. Prakticky celý zbytek prosince a leden roku 2014 jsem měl kopteru pohozenou v rohu stolu. Štvalo mě, že na ní není spoleh viz. text výše. Pokud se nebylo možné spolehnout na to, že po přepnutí do RTL se koptéra vrátí tak nemělo smysl pokoušet štěstí létáním s foťákem.
Začátkem února jsem se zase začal pokoušet o umravnění koptéry. Pořád to samé dokola. Nebylo možné spolehnout se na návrat zpět do místa startu (RTL). Začal jsem hledat i na zahraničních forech. A dozvěděl jsem se, že mít rozvodnou napájecí desku hned pod krabičkou s elektronikou (Arduflyer) asi opravdu není nejlepší řešení. V návaznosti na to jsem zjistil, že se dá pomocí MP změřit magnetické pole ovlivňující kompas na desce elektroniky. Podrobný postup je popsán zde (hledejte slovo compassmot). Velmi názorné video na youtube. Jaké bylo mé zděšení, když jsem namísto doporučených max. 30% na mé koptéře naměřil 183%!!! Rozvodná deska opustila model a nahradil jsem jí jen "rozpětkou" (analogie ke známému slovu rozdvojka). 4 fousy k regulátorům a jeden fous na osvětlení. Úpravou jsem se dostal z hrozivých 183% na radostných 12%. Po fixaci kablíků (rozpětky) v draku se sice hodnota zvýšila na 20%, ale to je v doporučené normě. Takže se těším na prověření zda to opravdu byl ten důvod podivného chování.
Internet – zdroje informací:
http://ardupilot.org/ ... naprosto základní zdroj informací
http://www.rcgroups.com/forums/showthread.php?t=1897295#post25070306 ... rozbalení Arduflyer a uvedení do provozu – 1. část
http://www.rcgroups.com/forums/showthread.php?t=1899530#post25100936 ... rozbalení
Arduflyer a uvedení do provozu – 2. část
http://www.youtube.com/watch?v=cCC-TyYz5_0&feature=share&list=UUZ8QqSqMocPrpInTENOU5RA ... video s letovými ukázkami základních vlastností a možnosti Arduflyer
http://team-blacksheep.com/shop/cat:discovery ... přehled komponent originálu kvadrokoptéry TBS discovery
Aktualizace 26.7, 2015: Po delší době jsem se zase začal trochu věnovat koptéře. Částečně za to může pořízení mini kamery Turnigy (SJ4000), částečně potřeba "odpočinout" si od letadel :).
Co se kamery a jejího upevnění na koptéru týče tak je jasné, že bez stabilizace / gimbalu se neobejdu, jen vybrat ten správný - to je téma další týdny.
Ale rozhodl jsem se, že osvětlení koptéry využiju také pro signalizaci "stavu řídící desky". Tedy sighalizaci stavu ARMED/DISARMED (často se mi stává, že držím páku na vysílači pro "odarmování", pak ji pustím a "odarmováno" není, takže znovu páku .... když se rozvítí LEDka na znamení, že je "odarmováno/zaarmováno" tak není co řešit) a nalezení GPS signálu (modul GPS sice při nalezení signálu začne blikat, ale ve dne, obzvlášť při slunečném počasí, blikání není moc dobře vidět).
Deska Arduflyer má výstupy pro připojení externích zařízení. Omezením je napětí jen 5V. Pro připojení zařízení (LED) s napájením třeba 12V je potřeba použít integrovaný obvod ULN2803 (spínací tranzistorové pole, obsahuje 8 darlingtonových párů) který je určen pro spínání větších proudů a napětí než zvládnou běžné digitální obvody či mikrořadiče.
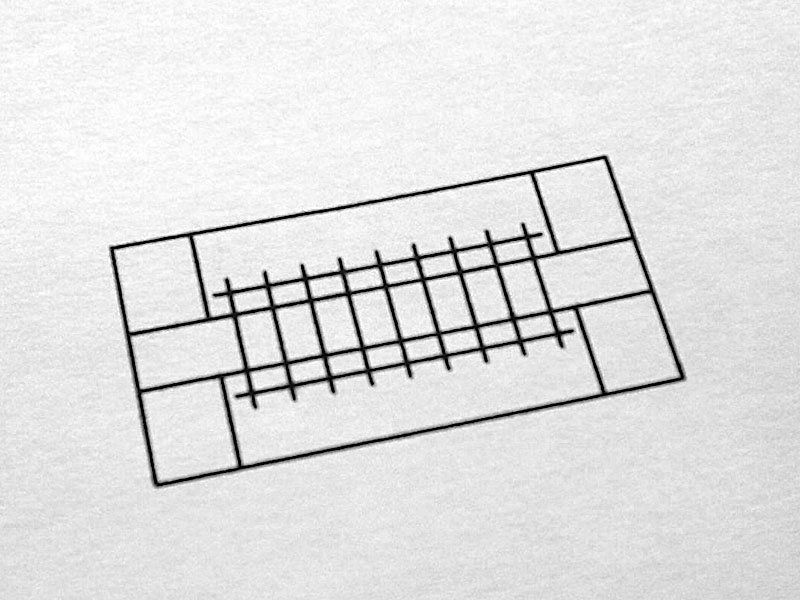
Obvod samotný je korunová položka, cca 15Kč. Neměl jsem možnost si obvod koupit v kamenném krámě a tak, namísto objednávky např. z GES, kde cenu významně navýší poštovné, jsem si 5ks ULN2803 objednal přes Ebay. Za cca 140Kč jsem měl integráče do 14ti dnů doma. Schéma celé instalace je na následujícím obrázku (převzato).
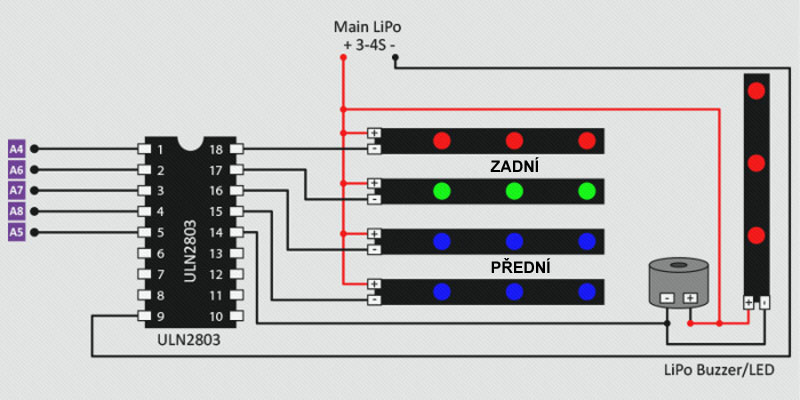
Na levé straně jsou popsány jednotlivé výstupy pro připojení na desku Arduflyer (A4-A8 - připojuje se na piny blíže sředu desky, na pinech zcela u kraje desky je "-", na středních pinech je "+"), napravo jsou schématicky zobrazeny jednotlivé LED pásy (na 12V) vč. piezo sirénky. Podrobný popis funkcí najdete např. na ardupilot.org. Zároveň je ale nutno dodat, že jak budou jednotlivé LED pásky svítit či blikat záleží také na nastavení vlastní desky (parametr LED_MODE v Mission Planner). Podrobně vše popisovat nebudu, doporučuji skouknout stránky uživatelů na webu diydrones.com - Max Levine, Scott Berfield. Na webu Scotta Berfielda jsem pochopil jak parametr LED_MODE nastavit. Defaultně je v Mission Planner parametr LED_MODE nastaven na hodnotu 9 a pak 4 pásy LED signalizují pomalým blikáním DISARMED, svitem ARMED a pátý pás (viz. schéma výše) signalizuje rychlým blikáním spojeným s pípáním nízké napětí baterie. POZOR, indikace napětí baterie funguje pouze pokud používáte pro napájení desky Power Modul. Bez tohoto modulu napájíte desku nejspíše z BEC některého z regulátorů a deska tak nemá šanci vědět, jaké napětí baterie má. Jak jsem napsal na začátku chtěl jsem signalizaci signálu GPS a právě na stránce Scotta Berfielda jsem našel odpověď. To, jak se budou LED pásy chovat je totiž dáno 8-bitovou informacín dle následující tabulky:
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | ||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | = 1 | Motor LEDs On/Off |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | = 2 | GPS On/Off |
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | = 4 | AUX Function On/Off |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | = 8 | Beeper On/Off |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | = 16 | Low Battery Flash – fast/slow |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | = 32 | Motor LEDs NAV blink On/Off |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | = 64 | GPS LEDs Nav Blink On/Off |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | = 128 | Not used |
Pro snadnější pochopení se hodí ještě obrázek, také z webu Scotta Berfielda, na kterém jsou popsány jednotlivé piny desky. Zajímavé jsou zejména piny A5, A6, A7. Je zde také popis pinů (-,+, signal).

Takže zpět k parametru LED_MODE. Ve spojení s tabulkou lze vydedukovat, že číslo 9 je tvořeno součtem 1+8 a tomu odpovídá funkce popsaná výše. Pro zapojení signalizace GPS je potřeba ji zapnout (GPS On/Off) tzn. ještě přičíst dvojku, 1+2+8=11.
Jen pro zajímavost - zatím nemám Power Modul takže signalizace nízkého napětí pro mě nemá význam. Ale zjistil jsem, že bez Power Modulu je na pinu A5 signalizováno přepnutí DISARMED/ARMED. Dvakrát rychlý "dvojblik" při přechodu na ARMED, jednou rychlý "dvojblik" při přechodu na DISAMED. Mezi "dvojbliky" při přechodu na ARMED je krátká pauza, po prvním "dvojbliku" je koptéra "zaarmovaná", druhý dvojblik zřejmě signalizuje, že deska komunikuje s GPS. Při prvním zapnutí koptréry (při prvním "zaarmování" po připojení baterie) je prodleva mezi dvěma "dvojbliky" delší, cca 2s
Při hledání informací o zapojení externího osvětlení doporučuji skouknout ještě videa uživatele Coisas Que Voam a uživatele Daveys FPV Adventures (LED bez využití ULN2803) a stránku WimsWorld s praktickým provedením modulu externího osvětlení. Zapojení je i pro neelektronika poměrně jednoduché a lze jej provést třeba na univerzální desce nebo stylem "vrabčí hnízdo".
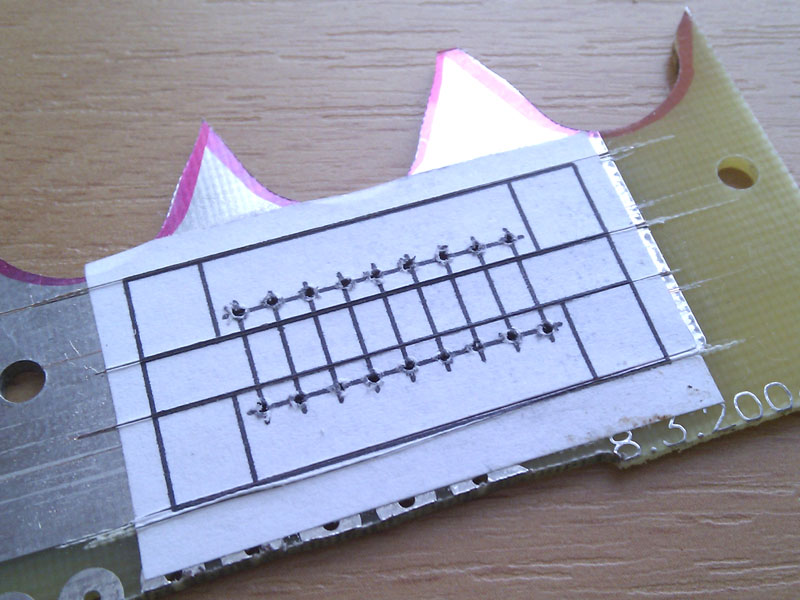
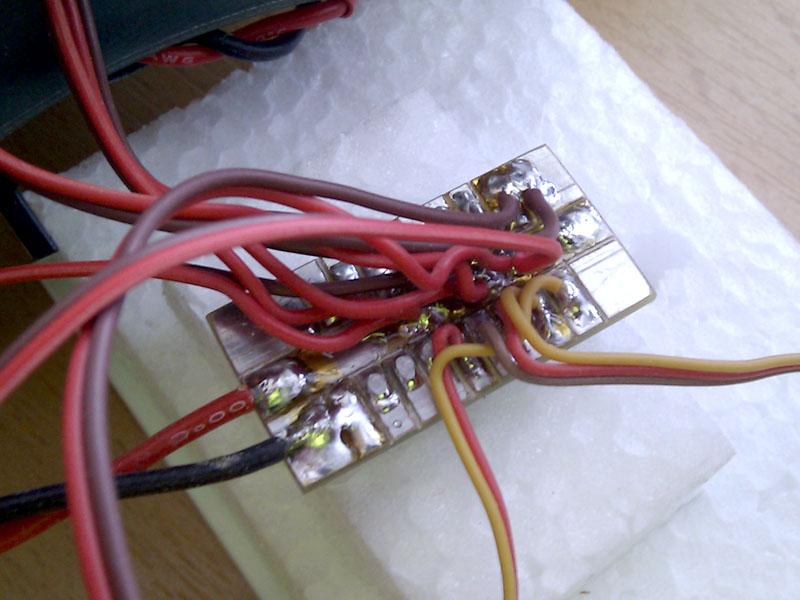
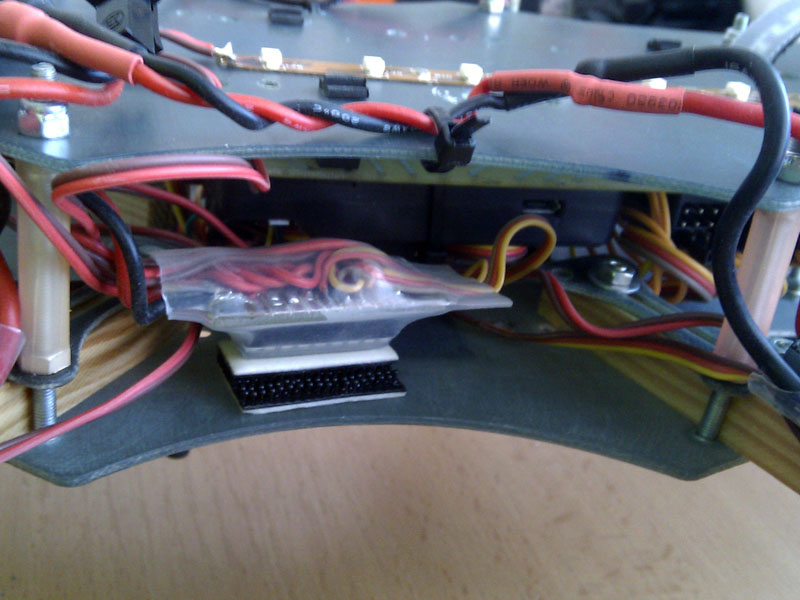
Já vyrobil jednoduchou destičku ze zbytku jiného plošného spoje proříznutím a proškrábnutím spár. Schéma desky jsem nakreslil, vytisknul na papír a lepidlem ve spreji přilepil na cuprextit. Důlčíkem jsem vyznačil otvory pro pouzdro integrovaného obvodu (raději jsem použil pouzdro, to snad kdyby se integrovaný obvod poškodil). Po vyvrtání děr 1mm jsem prořezal nožem jednotlivé spáry, odstranil papír, desku umyl benzínem od lepidla a spáry ještě prošrábnul rýsovací jehlou. Pro jistotu jsem voltmetrem zkontroloval, zda jsou jednotlivé plošky skutečně odděleny. Po oříznutí a obroušení desky na správný tvar následovalo letování. Zkusil jsem zda vše funguje jak má a deska putovala do smršťovací bužírky. K tělu koptéry je připevněna "hříbečkovým" suchým zipem.
Fotky a video:



Aktualizace 1.8. 2016: Od posledních pokusů s TBS uplynul zase rok. Kopteru jsem měl vloni na letní dovolené. Pokoušel jsem se něco natáčet na tehdy čerstvě koupenou kameru SJ4000. Ale videa stála za nic kvůli vibracím.
Za ten rok se ale stala spousta věcí. Koncem roku 2015 jsem začal zkoušet létání s malými koptérami velikosti 180-250 (čísla odpovídají přibližně vzdálenosti vrtulí v mm). Malé koptéry jsou samostatné téma. Ale létání s nimi mi dalo impulz vrátit se k TBS a pokusit se ho zprovoznit tak, aby koptéra plnila to pro co byla určena, tedy natáčení videí. Z minulosti jsem měl různé doplňkové komponenty (třeba 3DR napájecí modul). Některé dříve pořízené komponenty jsem naopak odložil. Např. moduly pro přenos telemetrických dat. Ty sice fungovaly dobře, ale přenos probíhal samostatně z modulu v koptéře do "pozemního" modulu, který se připojil k počítači. Zřejmě by bylo možné jej připojit i k tabletu. Tahat s sebou na létání komp je poněkud nepraktické a tak, po pořízení nových FPV brýlí, jsem se rozhodl přenášet telemetrická data spolu s obrazem z kamery v koptéře. Dokoupil jsem OSD modul minimOSD a k němu programátor. Prostřednictvím Facebooku jsem z druhé ruky pořídil ještě nějaké vrtule a gimbal.
Zjistil jsem, že stávající uspořádání rámu je, slušně řečeno, problematické. Celý rám je takový "gumový" a pružný. Částečně za to může koncepce rámu, pro kterou se vůbec nehodí způsob připevnění ramen, která jsem měl z dřevěných hranolů. Dřevěná ramena jsou sice lehká a kupodivu toho celkem dost vydržela, ale buhužel jsem je musel nahradit komerčními plastovými rameny, která obě desky rámu propojí a zajistí jeho tuhost.
Prvním krokem tedy byla kompletní rozborka koptéry.

Ještě na polorozebrané koptéře jsem si vyzkoušel funkčnost OSD modulu. První krok byla instalace firmware do modulu. Na inernetu se dají najít videa, jak přesně postupovat. Rozhodl jsem se pro ArduCAM OSD. Obslužný software pro nahrání firmware do modulu Config_OSD.zip a vlastní firmware MinimOSD_22.hex. OSD modul se propojí s programátorem a firmware se do modulu nahraje. Jak obojí propojit si každý, kdo se tímto začne zabývat, musí nastudovat sám. K možnostem nastavení OSD je na internetu celkem dost videí. Drobný zádrhel u mne nastal v tom, že firmware zřejmě umí přepínat mezi dvěma různými vzhledy obrazovek (zobrazení dat - Panel 1, Panel 2). Mně se ale obě obrazovky překrývaly. Pomohlo v ovládacím programu v záložce "OSD Toggle Channel" nastavit Disabled. Instalaci do polorozebrané koptéry jsem provedl společně s osazením napájecího modulu 3DR, který kromě zajištění napájení vlastní řídící APM desky umí také měřit proud. Protože tento modul napájí řídící desku odpojil jsem na všech regulátorech motorů plus kablík (regulátory původně napájely řídící desku, nyní nejsou do desky nejsou zapojeny). Poměrně důležitá informace, na kterou jsem narazil na jednom z videí popisující instalaci OSD modulu, se týká způsobu připojení modulu OSD k ostatní elektronice koptéry. U modul MinimOSD je možnost zvolit dva způsoby napájení, popis je k dispozici na ardupilot.org. Zvolil jsem napájení celého modulu OSD 5V z řídící desky a napájení kamery a video vysílače je zcela odděleno. To vyžaduje proletovat dvě propojky na OSD modulu a nezapojovat +12V, které jsou použity pro napájení kamery a video vysílače. Schéma viz. obrázky.


Po zkušebním zapojení elektroniky jsem upravil horní a spodní desku vyvrtáním nových otvorů pro šroubky plastových ramen a pro upevnění gimbalu. Ještě jsem vyrobil nové distanční sloupky. Ze skelné trubky jsem nařezal na potřebnou délku trubičky, zarovnal jejich konce v jednoduchém přípravku na přesnou délku. Trubičky jsou vloženy mezi desky, skrz ně prochází šroub s maticí. Není to zrovna nejelegantnější řešení, ale bylo to rychlé. V souvislosti s osazením měřícího a napájecího modulu 3DR jsem předělal kabeláž k regulátorům a vlastně k napájení celé koptéry. Kupodivu se mi tak dále podařilo snížit "magnetizmus", aktuálně jsem na 12%. O trablech s "magnetizmem" výše v textu. Konečně došlo na znovusestavení celé koptéry a první prolétnutí. Bez mučení přiznávám, že z letového projevu jsem nebyl vůbec nadšen. Geometricky se toho na koptéře mnoho nezměnilo. Co se ale změnilo byla vyšší hmotnost a také významný zásah do regulátorů v podobě přehrání firmware na BLheli. Regulátory jsou AFRO ESC 20A a pokud máte vhodný převodník lze jim firmware snadno přehrát. Od BLheli jsem čekal "lepší" regulaci, tento firmware se výborně osvědčil na malých koptérách. Tady jsem do toho ale zřejmě neměl sahat a měl jsem zůstat u původního Afro_firmware. No co, stalo se. Takže následovalo dlouhé ladění a kompletní změna nastavení PID. Původně koptéra létala slušně v takřka defaultním nastavení (default v Mission Planner). Nyní bylo potřeba poměrně změnit. Začal jsem ruční editací hodnot, ale stále se mi nedařilo dobrat se uspokojivého výsledku. Pomohl až režim Autotune, který řídící deska APM umí. Koptéra po tomto seřízení začala létat lépe.


Zatím posledním stavebním počinem byla instalace gimbalu. Jedná se o lehký a nepříliš "chytrý" 3-osý gimbal GH3 3D. Hmotnost 168g bez kamery je velice slušná. Nevýhodou je skutečnost, že si gimbal "nepamatuje" sřed na ose YAW (svislá osa). Takže vždy před zapnutím je potřeba kameru natočit tak, aby se "dívala" dopředu. Jinak stabilizace je vcelku slušná. Pokud byste, stejně jako já, potřebovali upravit programové nastavení gimbalu, tak vás možná překvapím informací, že budete potřebovat Win XP. Na novějších totiž zřejmě nelze nainstalovat potřebný ovladač pro gimbal.

A co mne ještě čeká?
- Pořádně vyladit nastavení PID
- Vyměnit stávající přijímač Jeti 35MHz za přijímač v pásmu 2,4GHz
- Doplnit přepínač zdroje videa. Abych si do brýlí mohl poslat jak obraz z FPV kamery (ta malá kamerka na boku v přední části koptéry), tak z "gopro" kamery. Přepínání mám, funguje, jen je potřeba ho do koptéry zabudovat.
Poznámka: Některé odkazy mohou být neaktuální. Internet je živý organizmus a vše se mění a přemísťuje.