Tak zase na mě padla hrozná touha postavit něco lítacího co ale není letadlo. Máte taky někdy ty stavy, že prostě cítíte, že by vaše dosavadní činnosti či snahy potřebovaly trochu okořenit? Já jo. Vloni to byla stavba Bellanky na brno MVVS8 a k tomu ještě elektrodmychadlová stíhačka T-45. Tak velké éro (Bellanku) jsem ještě neměl a dmychadláka taky ne. Neuplynul ani rok a je to tu znovu. Tentokrát jsem se zhlédnul ve vrtulnících co ale mají tři a více vrtulí. Klasický vrťas mne neláká. Jakousi shodou náhod jsem dal řeč s kamarádem od kombatu – Petrem Starkem a ejhle. On už nedávno postavil quadrokoptéru a kromě bohatých zkušeností z létání se navíc chystá postavit další. Chtěl zase quadro, já chtěl ale trikoptéru …. nedalo moc práce a i Petr začal chtít trikoptéru :-).
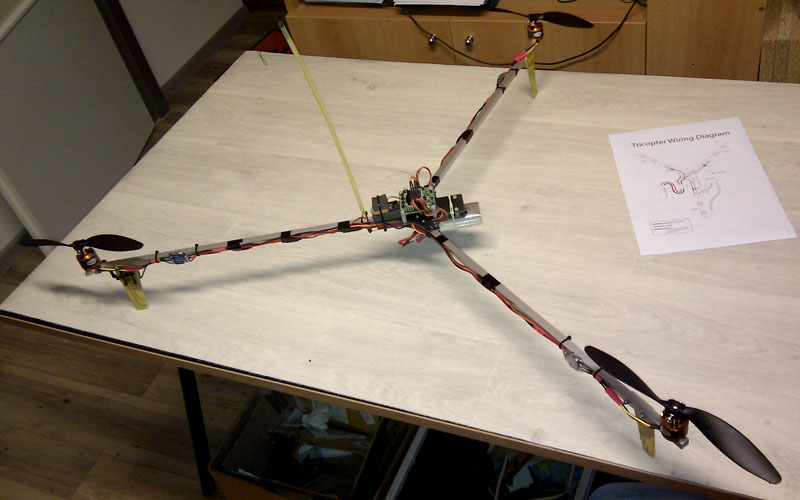
Takže TRIKOPTÉRA!
Klasicky, jako vždy u nových věcí jsem o těhle létajících předmětech věděl kulový. Ale na internetu je opravdu hodně videí a se základními informacemi pomohl Petr – jako jakou desku, jaké zhruba motory. A navíc, Petr v rámci „sebevzdělávání“ a využití vlastnoručně zhotovené frézky vyfrézoval základní desky pro zhotovení rámu resp. pro nesení tří ramen. Pro naší první trikoptéru jsme vycházeli hlavně z informací na webu http://rcexplorer.se/ a odtud pochází i tvary desek (Petr si kromě hlavních desek vyfrézoval i díly pro upevnění motorů na konce ramen).
| Základní parametry: | |
| délka ramen | 500mm od středu k osám motorů |
| hmotnost letová | 600g (bez baterie) |
| ovládané funkce | křidélka, výškovka, směrovka, motor, AUX |
| serva | 1x TowerPro MG90S |
| přijímač | ProfiPenta 35MHz |
| regulátory | Turnigy 12A |
| baterie | 3S1P1300mAh (Turnigy Nanotech), 3S1P2200mAh (Zippy) |
| motory | 2830-12, 980kV |
| elektronika (ovládací deska) | KK2.0 Multi-rotor |
Podrobnější popis vybavení a ostatní:
- motory „kombatové“ 2830-12, 980kV (když mě trikoptéra přestane bavit motory se budou hodit do EPA kombatu),
- regulátory „ze šuplíku“ Turnigy 12A, BEC 1A, přes původní obavy zda budou stačit jesou v pohodě,
- deska elektroniky KK2.0 Multi-rotor LCD Flight Control Board z Hobbykingu, verze firmware 1.2 (aktuálně upgradováno na 1.5 - firmware s možností ovládání "gimbalu" - stabilizace kamery či fotoaparátu pomocí dvou serv ovládaných přímo z desky)
- přijímač MZK ProfiPenta 35MHz,
- servo zadního motoru TowerPro MG90S (prý se na tohle hodí).
- Další "vymoženosti" v podobě osazení pípáku s externím napájením a zařízení pro stabilizaci kamery popisuji v jiných textech.
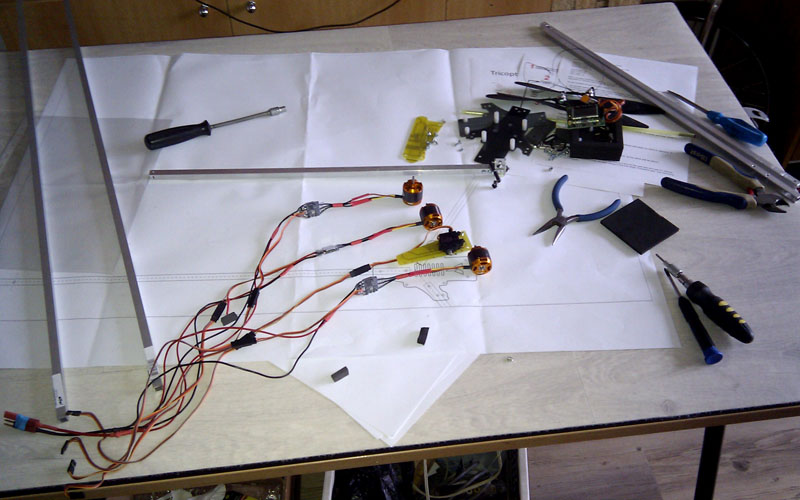
A to už se vlastně dostávám ke stavbě. Takže doma nemám na stavbu takřka nic. Za několik dní dorazily od Petra vyfrézované hlavní desky ze sklotextitu tl. 1,5mm a pár dní na to i základní komponenty made in china, paráda. Z čeho udělat ramena? Dřevěná mi přišla příliš obyčejná a tak jsem při návštěvě jednoho místního železářství koupil hliníkový U profil 10x10mm. Připadal mi torzně poněkud „gumový“, ale třeba to bude stačit. Stojanová vrtačka ve spojení s vrtáky několika průměrů daly za pár hodin vzniknout třem ramenům. Ještě jsem si liboval jak bude U profil bezva protože se do něj dá krásně umístit kabeláž. Trochu oříšek byl s pohyblivým ložem zadního motoru. Zadní motor u trikoptéry musí být natáčivý do stran. Na internetu jsem skouknul spoustu videí i fotek, ale žádné řešení se mi nelíbilo. Ať už proto, že bylo moc humpolácké (smrkový špalík otáčející se na hřebíku) nebo proto, že jsem neměl vhodné díly a nebo zkrátka bylo zařízení příliš složité na výrobu.
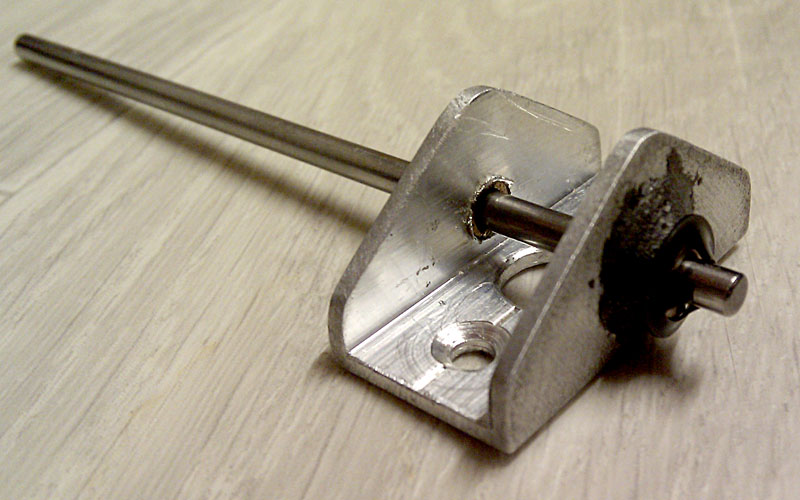
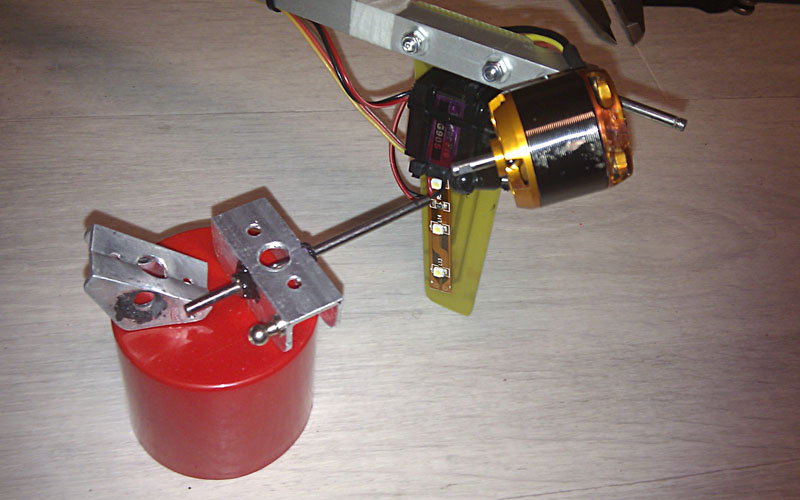
O co vlastně jde u tohohle zařízení, které na internetu najdete pod zkratkou YAW? Aby se motor otáčel do stran a přitom bylo uchycení pevné a bez vůlí. Hmm, honily se mi hlavou myšlenky na kuličková ložiska, frézované domečky pro ně, přesné hřídele …. ale v jednoduchosti je síla, ne? Základ z hliníkového U profilu 15x15mm, hřídel z CDrom mechaniky a ložiska? Stačí kluzná a ty jsou v CDromkových motorech. Ložisko z jednoho takového motoru jsem vyřezal malým kotoučkem připevněným na „dremelu“ (co je Demel ví každý, sice ho nemám, ale nějakou takovou napodobeninu ano). Ložisko jsem rozpůlil, po upnutí do vrtačky vybrousil malé osazení, do U profilu vyvrtal díry (které tedy moc souosé nebyly, takže se podařilo až na druhý pokus). Ložiska jsem do otvorů „zalisoval“ ve svěráku. Stejně ale pořád nebyly přesně proti sobě takže jsem otvory pro ložiska musel trochu doupravit pilníkem. Nakonec jsem ložiska nasunutá na hřídel 3mm do otvorů v U profilu zalepil Lepoxem Metal z historických zásob. Bezva, lože motoru se na hřídeli pěkně otáčí.
Teď ještě jak upevnit hřídel do ramene z U profilu? Vzal jsem kovový distanční sloupek z šestihranné tyče, ze dvou stran do něho vyvrtal po dvou dírách prům. 2,5mm a vyřezal závity M3. Šířka 6-hranu byla tak akorát pro vsunutí mezi boky U profilu. Do U profilu vyvrtat díry, nasadit 6-hran, zkrátit šroubky, kterými se 6-hran připevnil do U profilu a sešroubovat. Pak ještě protáhnout původní závit M3 v 6-hranu na průměr 3mm – použil jsem obyčejný vrták. A nyní už stačilo do otvoru zasunout hřídel. Ta jde do díry krásně těsně a bez vůlí. Na zajištění hřídele proti vysunutí jsem použil stavěcí kroužek u kterého jsem ve vrtačce zmenšil jeho vnější průměr. Pro červíka stavěcího kroužku jsem na hřídeli vybrousil „dremelem“ plošku. Aby se naopak z hřídele nevysunula pohyblivá část (lože motoru) udělal jsem na hřídeli frézkou drážku (hřídelku jsem upnul do vrtačky a pro broušení drážky roztočil). Na hřídel jsem narazil „samojistící podložku“ (u MP JET tomu říkají QUICK LOCK), je to taková ta podložka, kterou jste možná někdy použili pro zajištění blimpu na páce serva či kormidla). Podložka zapadla do drážky a hotovo. Vůle pro pohyb lože se vymezí stavěcím kroužkem viz. výše.
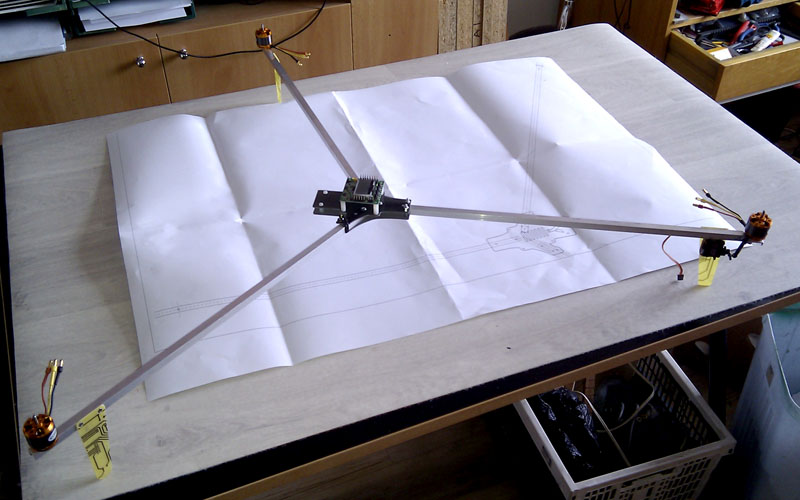
Připravená ramena jsem pomocí šroubků a samojistících matic M3 připevnil k desce. Zadní rameno je připevněno jedním šroubem, který prochází vlastním ramenem a na kraji desky jsou dva šrouby, které jsou po stranách ramene – neprocházejí skrz U-profil. Nechtěl jsem zbytečně oslabovat průřez ramene dírou v místě kde předpokládám největší zatížení při případných ranách. Přední ramena jsou sklopná. V ose otáčení jsou také šrouby a samojistné matice M3. Zvláštností možná je, že šrouby neprocházejí skrze obě desky, ale ramena jsou přišroubovaná jen k horní desce – nechtěl jsem aby mi na spodní straně koukaly hlavy šroubů nebo matice (ano, při použití šroubů se zápustnými hlavami by nic nekoukalo J ).
Přední ramena jsou sklopná. Aha, takže jak je zajistit ve „vytažené“ poloze? Na internetu jsem po pravdě řečeno našel jen dva způsoby. 1. přitažení ramene k deskám suchým zipem, 2. v ramenou jsou jakési čepy a v deskách otvory do kterých se čepy zacvaknou. Sucháč mě moc neoslovil a u druhého řešení by bylo potřeba pracovat opravdu přesně aby to fungovalo. Takže jsem vymyslel řešení třetí. Dorazem pro rameno je standardně šroub. Já vzal kus závitové tyče M3, distanční sloupek z tenkostěnné trubky (o délce stejné jako je mezera mezi deskami). Sloupek jsem vložil mezi desky, zasunul závitovou tyč a z obou stran přitáhnul samojistnými maticemi M3. Na přesahující části závitové tyče a přes ramena jsem pak navlékl gumový O-kroužek z příslušenství k unášečům motorů. Aby se gumový O-kroužek o závity zbytečně neodíral a aby na tyčce držel tak jsem z konců závitovek ve vrtačce odbrousil závity a ještě kulatým jehlovým pilníkem vybrousil žlábky, do kterých O-kroužek parádně zapadne. Přesah závitovky přes matice je cca 4mm a zdá se, že to úplně stačí. Po pravdě, žádnou závitovku jsem nepoužil, vzal jsem jen delší mosazný šroub :-)..
V přední části jsem desky původně spojil přes plastové distanční sloupky. Později jsem je ale nahradil kovovými protože jsem si vymyslel, že asi bude fakt lepší desku elektroniky nějak chránit v případě nepovedeného přistání „na záda“. „Chránič“ je z drátu do kola ohnutého tak aby přesahoval kus nad úroveň desky elektroniky vč. konektorů. A tenhle naohýbaný drát je přišroubovaný právě k distančním sloupkům vepředu. Do těch plastových by se fakt šroub utáhnout nedal. Za ten drátěný chránič se dá trikoptéra kdyžtak i nést.
Na konce ramen jsem ještě přišrouboval „nožičky“ vyříznuté ze sklotextitu. Na nožičce u zadního motoru je stahovacími pásky připevněno servo naklápění motoru. Propojení páky serva a pohyblivého lože motoru je táhlem na jehož obou koncích jsou koncovky s kulovým čepem.
Mechanická část je hotova a pokračuji elektroinstalací. Po krátkém pátrání na internetu a přečtení návodu k desce elektroniky bylo jasné, že elektroinstalace by neměla být nic složitého. Motory jsem k regulátorům přiletoval „natvrdo“ – bez konektorů. Regulátory jsou umístěny u motorů na koncích ramen. Jednak jsem se někde dočetl, že kablíky mezi motorem a regulátorem by neměly být moc dlouhé a hlavně mi přišlo lepší táhnout k regulátoru jen dva silnější vodiče (AWG 20) než mít regulátor u desky a táhnout k motoru vodiče tři.
Napájení regulátorů motorů je společné z pohonné baterie. Napájení desky elektroniky je z BEC levého předního motoru. Deska má vstup pro první motor oddělený od vstupů ostatních motorů takže vzhledem k použití serva na ovládání zadního motoru bylo pro jeho napájení potřeba využít ještě další BEC připojený do řady konektorů pro motory 2 až 8 (deska umožňuje připojit až 8 motorů resp. jejich regulátorů). Konektory pro motory 2 až 8 mají + a – propojené a tak jsem preventivně BEC třetího regulátoru nepoužil. Servo zadního motoru se u trikoptéry připojuje na konektor 4. motoru. Kablíky od regulátorů a od serva jsem prozatím nastavil prodlužkami, nechtělo se mi kablíky stříhat a prodlužovat pájením. Také by se zcela jistě dalo na množství kablíků ušetřit. Zem je všude společná takže od regulátorů u kterých je využitý BEC (u mne pravý a levý) by stačilo táhnout jen + a signál. Zem by se vzala rovnou z baterie. U zadního motoru by pak stačil jen signál a vlastně z regulátoru by mohlo být napájeno rovnou servo, které je umístěno jen kousek od něj. No tak příště …. možná.
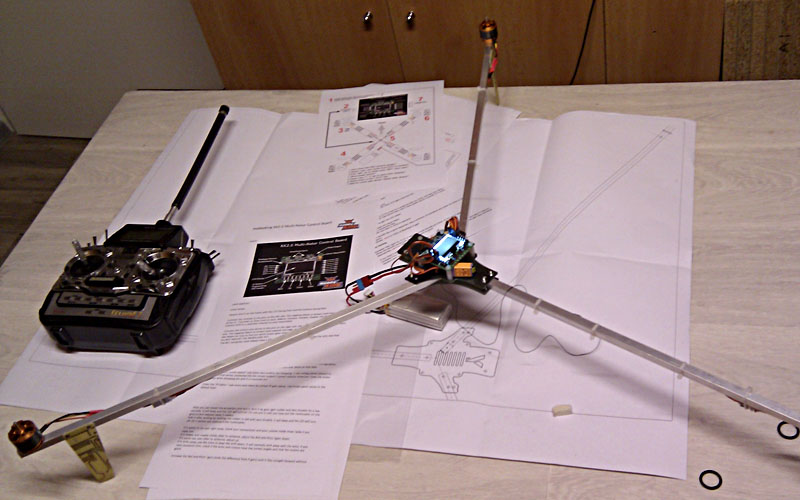
Deska elektroniky je na plastových distančních sloupcích (na internetu jsem našel i variantu kdy je deska zavěšena na gumových okách - sloupky jsou mimo desku a deska je na ně "přivázána" gumovými oky). Dle návodu je deska propojena s přijímačem. Nemaje dostatek prodlužek samička-samička propojil jsem 3-žilovou prodlužkou jen kanál č.1 (křidélka) a u ostatních kanálů jsem propojil jen signál (2-výškovka, 3-motor, 4-směrovka, 5-AUX neboli zapínání/vypínání funkce auto level).
Zadrátováno.
Prvního okamžiku připojení napájení se vždy trochu obávám. Obyčejně nastane jen jedna z následujících možností – 1. funguje to, svítí to, 2. odněkud se zakouří a smrdí to. Zdařila se varianta č.1. Displej svítí, motory pípají. Vlastní nastavení desky pro létání je samostatné téma, které zatím nebudu pitvat protože sám nemám ještě nastaveno. Každopádně to úplně základní nastavení je podle manuálu. Bojoval jsem jen s nastavením vysílače pro využití spínání funkce auto-level (bylo potřeba nastavit jiný rozsah výchylky než ve vysílači bylo standardně) a také mě pozlobila funkce desky, která se do pohotovostního stavu uvádí vychýlením kniplu směrovky doprava současně při úplně staženém motoru. Při prvním testování jsem použil přijímač Potensky 5k a vše fungovalo tak jak má. Jenže pak jsem přijímač vyměnil za MZK ProfiPentu a ejhle, bylo potřeba trochu poštelovat neutrály a pak už se mi desku nedařilo zapnout, a to ani po zpětné výměně přijímače zase za Potenského. Zkrátím to, po zkontrolování veškeré kabeláže, po zapůjčení stejné desky od kamaráda jsem přišel na to, že i rozsah plynu je špatně. Takže ačkoli deska v nastavení ukazovala, že plyn je na minimum pro její uvedení do pohotovostního stavu to nestačilo a bylo potřeba zvětšit výchylku plynu směrem k minimu.
Namontoval jsem vrtule. Nemaje vhodné, přesněji řečeno dvě pravotočivé a jednu levotočivou, což je podmínka pro ovládání trikoptéry, namontoval jsem zatím všechny tři levotočivé („normální“) a to SF 9/6. První roztočení vrtulí a nepěkné rozkmitání všech ramen. Při vyšších otáčkách to nebylo tak znát, ale při nižších se celá trikoptéra stojící na třech sklotextitových nožkách rozkývala a mě bylo jasné, že U-profil byla špatná volba. Že by to na první zálet mohlo stačit? A co když ne, co když se něco uklepe a upadne? Ne, ne. Tohle se musí předělat. Je sice svátek 1. května, ale na to si v OBI nehrají a v regálu mají ještě tři hliníkové metrové čtverhranné trubky 10x10mm. Kdybych neměl už vše udělané na výšku 10mm asi bych zvolil rozměr 11,5x11,5, které tu mají také a mají navíc po celé délce na všech čtyřech stranách uprostřed mělkou drážku. Pro vrtání děr přesně uprostřed ideální. Ale mám nachystáno na 10mm takže beru jen obyč. se stříbrným eloxem. Opouštím regál se dvěma trubkami v ruce. Po odchodu od kasy raději hned zapomínám kolik že stály.
Ještě pozor! Pokud jdou ať už od motorů nebo od vrtulí do konstrukce vibrace je to ŠPATNĚ! Motory i vrtule je potřeba vyvážit, postačí např. nalepením kousku izolepy.
Doma rozebírám celou trikoptéru, demontuji ramena z U-profilů a dělám podle nich ramena z donesených trubek. Jde to rychle, nemusím ani moc měřit protože hlavní míry přenáším z původních ramen. Jen s upevněním zadního pohyblivého lože motoru se chvíli trápím protože ten 6-hran zkrátka do uzavřeného profilu nejde přidělat tak jednoduše jako do otevřeného U. Ale zakrátko je vyřešeno. Servo už zase hýbe motorem. Chvíli přemýšlím jestli kabeláž zase schovat dovnitř do trubky. Dávám přednost jednoduchosti (pohodlnosti?) a kablíky připevňuji obyčejnou elektrikářskou izolačkou. Ostatně provrtat trubku ať už jedním nebo více otvory nechci. Pokud stavitelé koptér vedou kabeláž vnitřkem ramen (trubek) obyčejně pak nemají do ramen nic přišroubovaného aby byla trubka po celé délce prázdná.
Ještě podle jednoho videa na internetu, kde má chlapík stejnou trikoptéru, měním nastavení desky elektroniky. Sice netuším proč je kde jaké číslo resp. hodnota, ale to snad časem pochopím.
Nemám vhodné vrtule a tak pro tuto chvíli se stavbou končím. Kamarád Petr slíbil nějaké vrtule k zapůjčení tak jsem zvědav co přinese. Ostatně první let asi bude stejně v jeho režii :-). Nikdy jsem neměl vrtulník, pokud odmyslím ty hračkoidní se dvěma vrtulemi, a nemám ani žádnou simulátorovou průpravu.
Uplynulo pár dní a .....
První let proběhl při příležitosti závodů kombatu EPA nedaleko Lipan (ano, tam co byla ta slavná bitva). Odlétali jsme pár soubojů a v delší přestávce mezi koly vynucené krátkou přeháňkou nejdříve vzlétl Petr se svou novou quadrokoptérou. A že prý jestli si to chci zkusit. A já že jo. Krátký let a divný pocit z neznámého co nemusí skočit dobře a raději jsem mu rádio zase vrátil. Ale nedalo mi to a i přes nepříznivé počasí (lehké mrholení a slabý vítr) jsem svou trikoptéru připravil k letu a ..... vzlétl. Kupodivu ačkoli quadrokoptéra mi moc nesedla (na těch pár vteřin) trikoptéra se chovala tak nějak lépe a dovolil jsem si několik krátkých zavisení a třetí vzlet už byl s průlety kolem hlavy. Řídí se to jak letadlo, je potřeba řídit všemi "kormidly" tzn. vč. směrovky (to pro ty kteří nemají ovládání směrovky v oblibě). Počasí opravdu nebylo na zálet a tak jsem toho raději nechal.
Další den jsem vytáhnul trikoptéru znovu ven, už s nainstalovanými LED světelnými pásky abych měl lepší představu o poloze modelu. Ve dne ale stejně svit LED moc nepomůže. Párkrát jsem se prolétnul, začal kravit a nemohlo to skončit jinak než ránou. Měkká zem je milosrdná a stačilo jen vydloubat hlínu z jednoho motoru. Odpoledne další létání. Jen jsem špatně zajistil jedno rameno a to se za letu složilo. Opět následovala rána. Znovu do trávy a prakticky bez následků. Další let a další kravení, ale bez rány :). Rána přišla až když jsem v poměrně silném větru zapnul funkci Self Leveling. Koptéra se ustabilizovala, ale vítr ji odnesl dost daleko odemne abych netušil v jaké se nachází poloze. A tak v domění, že ji mám v náklonu dopředu a vracím se k sobě byla naopak v náklonu dozadu a skončila na zemi nárazem zadní pohyblivou částí do asfaltu.
Všechny ty rány kupodivu nezanechaly žádné "elektrické" následky. Došlo jen k mechanickému poškození. Dvě ramena byla hodně zohýbaná (začínám rozumět tomu proč se tak často používají obyčejné smrkové nosníky) a pohyblivé lože zadního motoru bylo na maděru. Takže ramena ve svěráku naohýbána zpět do původního tvaru, zadní lože vyrobeno nové a zase je vše připraveno na létání.
Další letový den po opravě byl ve znamení poletování nad loukou obklopenou keři a nevysokou zástavbou. Zkoušel jsem precizní řízení třeba podél stromu nebo nad cestou - pomalu a plynule.
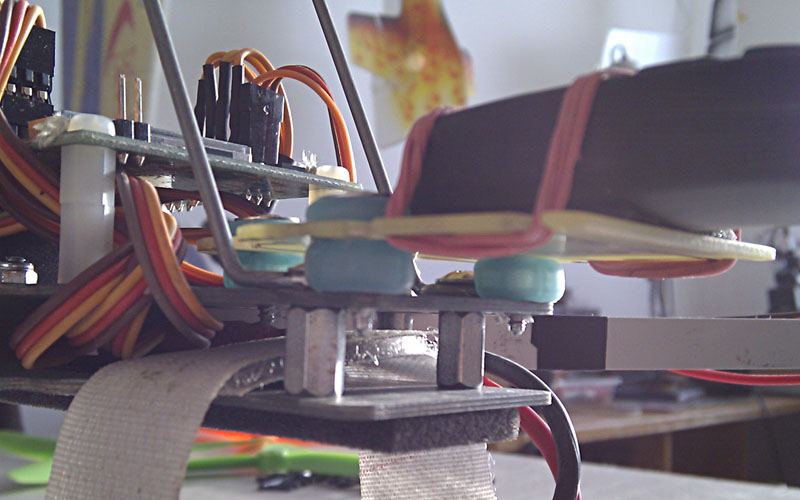
Na předek jsem připevnil malou klíčenkovou kameru. První filmařské pokusy byly úměrné mé pečlivosti s vyvážením vrtulí - nevyvážíš = nenatočíš (nenatočíš tak aby to bylo koukatelné). Takže jsem vyvážil jak vrtule tak i rotory motorů. Použil jsem jen obyč. izolepu na vrtule a elektrikářskou pásku na rotory. A bylo to znát. Abych i ty poslední vibrace odstranil resp. zabránil přenosu do obrazu udělal jsem kameře lože upevněné na třech silikonových silentblocích vykuchaných z CDrom mechaniky. No a výsledek? Je to horší než bez lože!
Přišel další víkend, ráno sice upršený ale postupně se počasí vybralo a odpoledně bylo nádherně. Na letišti v Suché bylo zrovna setkání jetů a dorazili i kolegové ze Slovenska, kteří ještě nedávno létali kombat a nyní se začali věnovat i turbínám. Společné večerní posezení ve stejkárně u pořádné flákoty bylo fajn. Ale to předbíhám a vlastně to sem asi ani nepatří. Zkrátka odpoledne bylo parádně a tak jsem na koptéru přidělal foťák (protože ta kamerka v klíčence kvalitou záznamu opravdu nevyniká) a natočil několik videí. Jedno z nich v galerii viz. níže. Bohužel nemohu se zbavit vibrací jdoucích do konstrukce zřejmě od vrtulí. Pokud je koptéra "v klidu", tzn. moc se ve vzduchu nehýbe, tak vibrace takřka nejsou, ale jakmile se dá do pohybu a zejména do klesání je zle. Na videu je i slyšet kdy se konstrukce rozvibruje.
Opět uplynulo několik dní a poprvé jsem se odhodlal zkusit přemet a výkrut. Kvůli možné ráně jsem raději vybral plochu s vyšší travou. Takže jak to dopadlo? Jde to :). Jen je potřeba počítat s tím, že výkrut ani přemet neproběhne na místě, ale je na něj potřeba docela velká výška. A protože s jídlem roste chuť a když jsem dokázal přemet a výkrut tak už jsem asi borec kravil jsem kravil a opět s koptérou fláknul - opět kvůli ztrátě orientace. Vysoká tráva byla fajn, jen se ohnulo zadní rameno, ale ztratil jsem klíčenkovou kamerku :( .... ale později ji našel :). Dokonce i vč. ulomených listů vrtule, které jsem pokusně slepil a zase fungovaly.
Další létání opět na louce, kde jsem dočasně ztratil kamerku, viz. výše. Po upgrade firmware jsem se pokoušel naladit self level. Je to lepší, ale úplně 100% asi ne, ale co, zatím stačí. Zkouším přemety jak dopředu tak dozadu, dobrý, .... pak výkrut a ouha .... neodhadl jsem srovnání modelu a ten z výkrutu vylétnul šikmo do strany a dozadu kde zrovna stál sloup veřejného osvětlení. Rána jak z děla, kupodivu to odneslo jen jedno rameno, které bylo opravdu hodně zohýbané, a dvě vrtule. Doma jsem pak zjistil, že nesvítí ještě část diodového pásu. Kus jsem vyměnil za nový, u druhé části jsem přeletoval jen jednu diodu co byla rozdrcená. Chvilka hraní s narovnáním zohýbaného ramene ve svěráku a je vše zas připravené k letu. Odolnost toho stroje je neskutečná.
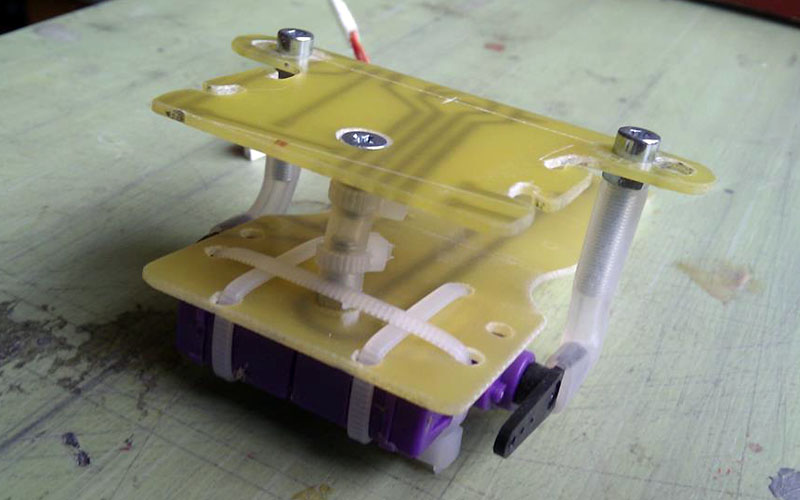
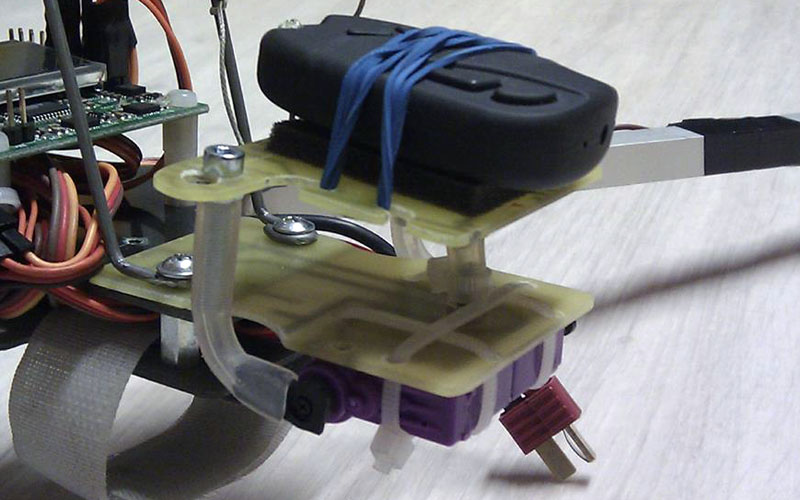
Neustále laboruji s upevněním kamery. Protože firmware 1.5 umí ovládat naklápění kamery pomocí dvou serv tak aby byla neustále vodorovně musel jsem to vyzkoušet. Chvilka cvičení s pilníky a vrtačkou a z desky sklotextitu jsem vyrobil tzv. gimbal. Více např. zde na RCGROUPS. Pružné spojení jak základních dvou desek tak pák serv s pohyblivou deskou je dobrý nápad. Jen u toho ovládání desky dvěma servy jsem chvíli laboroval jak s délkou silikonových hadiček tak s umístěním hadičky na desce kamery. Zařízení funguje vcelku slušně i když s nastavením na desce elektroniky jsem se dost navztekal. Šlo o to vyladit chod serv, která jsou mixována, tak aby jejich dráha byla přibližně stejná. Ale kdo si s tím bude hrát na to přijde a kdo nebude toho to nezajímá :)
Stále se nedaří odstranit chvění z obrazu. Dá se říci, že nejlepší výsledky jsou s kamerou upevněnou "natvrdo" na konstrukci koptery. Jakmile vložím pružný člen je to spíš horší.
Pokračování …
Fotky a video: