Delší dobu spíš občasně poletuji s koptérami a to nejen malými "závodními", ale i s trochu větší určenou pro natáčení videí. Ve chvíli, kdy začnete s natáčením experimentovat, dostanete se do snad nikdy nekončící spirály. Jaké? Jednoduše začnete zjišťovat, že to co aktuálně pro natáčení máte, by chtělo určitě vylepšit. Takže začnete s levnou kamerou připevněnou přímo na koptéru. Pak začnete řešit uložení kamery kvůli odstranění vibrací. Následuje rozhodnutí, že prostě bez gimbalu to nepůjde. 2D nebo 3D? 2D by mohl stačit. Nebude stačit. Tak 3D (3-osý). Jaký? ....
Následující text je věnován gimbalu HMG YI3D. To sice není zrovna zázrak, ale věřte, že jsou i mnohem horší kousky. Samozřejmě i mnohem lepší. Tento je určen pro připevnění kamery typu Go Pro, Xiaomi Yi. Já mám kamery Firefly 6C a 7S. A důležitá věc - cena. Třeba na Aliexpress.com se nabízí za téměř 180$, na HobbyKing za 130$ (ale zas je potřeba počítat s cenou za dopravu). Někde na internetu jsem ho zahlédl za cca 80$, ale zřejmě to byla jen nějaká akce. Já ho koupil z druhé ruky za cca 1400Kč, za původní cenu bych ho nebral. Jen dodám, že jsem ho přes Facebook koupil od jistého Martina Škorpila z Liberce a dovolím si doporučit, abyste si na tohohle týpka dali velký pozor. Gimbal jsem z něj po více jak měsíci sice dostal, ale nebylo to úplně jednoduché. A jak jsem při rozbalení balíčku zjistil, chyběla spona pro připevnění kamery. Ještě že mám možnost 3D tisku. Tolik na úvod.
| Základní parametry: | |
| typ gimbalu | Brushless, 3-osý |
| hlavní rozměry | 128 x 100 x 88mm |
| hmotnost | 194g |
| naklápění kamery (TILT) | -90° až +30° (90° dolů) |
| rotace okolo svislé osy (YAW) | -360° až +360° |
| naklápění (ROLL) | -25° až +25° |
| napájení | 12V (3S LiPol) |
| Verze ovládací desky | 1.0+3a, 8bit |
| Firmware | Alex mos 2.2 b2 |
| GUI software (pro nastavování) | SimpleBGC GUI (nutno použít verzi 2.2 b2) |
| Režimy | Lock / Follow |
| RC ovládání | Režimy, všechny osy |
| AV kabel | Součást gimbalu, kablík je vyveden z držáku kamery. |
Gimbal je při koupi připraven pro použití, není třeba nic nastavovat. Původní majitel ho provozoval s kamerou Yi a tvrdil, že vše fungovalo skvěle. Jestli jemu vše fungovalo opravdu skvěle sice netuším, ale mně se bohužel po zapnutí a aktivaci gimbalu začala kamera mírně naklápět do strany (ROLL). Takže jsem začal řešit co s tím a to je vlastně důvod, proč tento článek vznikl.
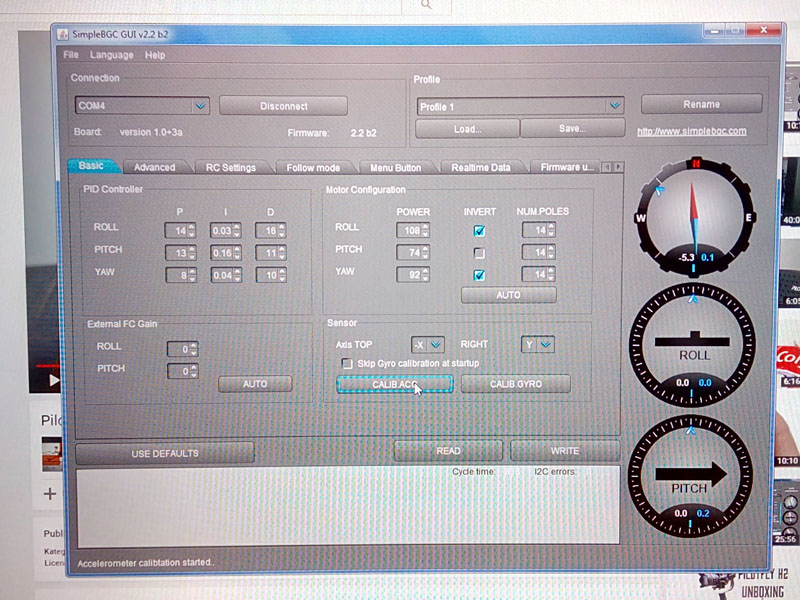
Po delším bádání jsem přišel na to, jak gimbal propojit s PC. Ovládací program je SimpleBGC ve verzi 2.2 b2. Ještě je nutno do počítače nainstalovat správné ovladače. Při propojení gimbalu s PC pomocí USB kabelu se OS (u mne Win 7 64bit) sice snaží ovladače najít, ale nenajde. Podle různých návodů na Youtube to vypadalo, že správnými ovladači by měly být CP210x USB to UART Bridge VCP Drivers. Ovšem ouha, ač ovladače správně nainstalovány připojení nefunguje a ve správci zařízení se neustále objevuje chyba ovladače u USB2.0-Serial. Hledám tedy podle tohoto hesla a nalézám správné ovladače na webu www.driverscape.com. Stáhl jsem verzi 3.3.2011.11 (jen ovladače, ne jakýsi pochybný Installer). Zapínám gimbal (připojuji napětí 12V, jen 5V z USB nestačí), spouštím obslužný program SimpleBGC a poprvé propojuji gimbal s PC. Znáte ten pocit, kdy cítíte, že buď to bude fungovat a je takřka vyhráno, nebo nebude a také to může znamenat, že jste právě vyhodili určitou sumu peněz?
V rozbalovacím menu u položky Connect se objevuje nový port a po kliknutí se gimbal skutečně připojil. Hurá. Zkoumám různá menu, nic neměním, jen prohlížím.
Co mne zajímá je tlačítko CALIB.ACC. Ještě pro jistotu koukám na Youtube jak se to vlastně dělá. jdu do toho. Mám trochu křivý stůl a tak vyrovnávám koptéru přibližně do roviny a pod kameru dávám skleněnou desku, také srovnanou do vodováhy. Opět ten pocit, kdy nevíte jak to dopadne. První pokus o kalibraci dělám tak, že kameru držím rukou a současně mačkám tlačítko pro kalibraci. Výsledek je viditelný, ovšem rukou kameru ve dvou rovinách správně neudržím. Tak znovu. Mezi sklem a kamerou je mezera přesně na dvě baterie AA. Podkládám kameru a znovu mačkám tlačítko. Teď už je to OK, kamera je přesně vodorovně.
Ego posilněné úspěchem nabádá k dalším pokusům. Do PID hrabat nebudu, ty se zdají být v pořádku. Ale v záložce Advanced je možnost třeba zamknout stabilizaci v nějaké ose. Na zkoušku dávám u ROLL Disabled a mačkám tlačítko pro zápis hodnot do gimbalu WRITE. Gimbal přestal "gimbalovat", kamera se stočila nějak na křivo. Jak kdyby to bylo celé vypnuté, ale vypnuté to přeci není! Výborně, dohrál jsem, vyrobil jsem mrtvolu. Odpojuji a znovu připojuji napájení gimbalu. Pokouším se připojit k PC. Nic. Odpojuji vše (tedy napájení 12V i USB) a nadávám si do ..... Znovu připojuji 12V .... a .... gimbal žije! Dokonce akceptoval moje poslední nastavení (vypnutí stabilizace ROLL). Takže znovu připojuji k PC, vracím zpět nastavení ROLL. To že gimbal opět omdlí už mě nemůže rozhodit, vše odpojuji, připojuji a funguje to. Uf.
Foto: