Další halový akrobat G77 navazuje předchozí model Ginger 77. Kromě trupu je zcela stejný. Trup je konstrukčně i tvarově upraven.
| Základní parametry: | |
| rozpětí | 770mm |
| délka (vč. motoru a vrtule) | 950mm |
| hmotnost (bez baterií) | 115g |
| ovládané funkce | křidélka, výškovka, směrovka, motor |
| motor | POT30 |
| baterie | LiPol 2x360mAh (25g) |
| serva | 3x waypoint60 |
| regulátor | MGM TMM easy 7 |
| přijímač | Potensky Pico Smart 5 FM |
| vysílač | Flash5 (tzn. žádné mixy) |
Materiálem pro celý model je climapor tl.3mm, výztuha podvozku, motorová
přepážka a páky křidélek ze sklotextitu tl. 0,5mm. Táhla a "drátěné"
výztuhy z uhlíkového drátu prům. 0,8mm, podvozkové nohy z uhlíkového drátu
prům. 1,5mm.
Trup je deskový s výztuhou trubkou čtvercového průřezu vytvořenou nalepením
dvou "stříšek" z obou stran trupu. Je včetně pylonu horního
křídla ve kterém je osazeno servo křídélek.
Všechny climaporové díly modelu měly před barvením hmotnost 56g (celková
plocha 52dm2). Barveno lihovými barvami Agama (airbrushovou pistolí).
Stavba se dost vlekla hlavně kvůli neustálemu přemýšlení jak vše vyřešit co nejjednodušeji, svoji roli sehrála také lenost. I když to nevypadá dost času zabralo třeba vymýšlení uložení serv ocasních ploch. Model jsem dokončil o víkendu 26.2. 2006. (stavba zahájena někdy koncem ledna).
28.2. 2006 - První zálet v hale a seznamování se s novým modelem. Je to zase trochu jiné než předchozí modely. V podstatě ladím jen polohu těžiště a zjišťuji, že dvouměsíční nelétání je sakra vidět. Protože jsem s sebou měl i starší model Ginger 77 byla možnost srovnání - letové vlastnosti jsou krapet odlišné, každopádně je vidět, že nový model je trochu živější - zřejmě to bude vlivem větší "aerodynamické" čistoty trupu ve spojení s výborným motorem POT30.
2.3. 2006 - S modelem se stále seznamuji. Létáním končím předčasně nárazem čumákem do země. S heslem "žádná kaše se nejí tak horká jak se uvaří" opravuji model až pozdě večer. Současně umísťuji do definitivní polohy baterii (výřez v páteři) a celkově vyvažuji model.
3.3. 2006 - Ráno zase v hale a konečně mám z modelu taky trochu radosti. Nevyvážený model (podélně a výškově) byl spíš k zlosti, po nočním dovážení už létá k téměř plné spokojenosti. Ještě trochu ladění s výškovým vyvážením - pro baterii nebylo nutno kuchat páteř protože je potřeba ji posunout více dolu. Ještě to chce vyladit diferenciaci křidélek a naučit model (nebo sebe) pořádně výkruty ve visu.
10.3. 2006 - I když jsem si říkal, že tenhle model bude vyloženě na akrobačku a nebudu s ním mlátit (rozuměj trénovat nové obraty, lítat v obýváku apod.) tak se tak nestalo a předek trupu postupně přestával plnit úlohu přesného a pevného uchycení motoru. Pochroumaný čumák z climaporu nahradil nový z epp - deska se dvěma tvarovanými boky. Chtěl jsem motor při této příležitosti upevnit přes přírubu na tři body pro přesnější a "stálejší" nastavení vyosení, ale přeci jen hmotnostně vychází zalepení motoru přímo do přepážky lépe. Takové upevnění, alespoň u mne, má dost zásadní nevýhodu - motor zalepený vteřiňákem do sklotextitové přepážky nedrží a zřejmě vlivem ohřívání motoru se uvolňuje a pootáčí. Na sklotextitu vteřiňák drží obstojně, na těle motoru (dural) nikoli.
Jedna nepříjemnost ve spojení přijímače Potensky Pico Smart 5 FM a regulátoru TMM easy 7. Pokud chci létat bez brzdy otáčení vrtule mám problém. Na regulátoru se brzda vypíná bohužel při každém startu (připojení baterií) tak, že dám páku plynu na maximum, připojím baterii k regulátoru a po "odpípání" regulátoru (nastavení bez brzdy) páku plynu stáhnu na minimum a startuji. Tenhle postup má zásadní vadu a tou je existence fail-save v přijímači. Fail-save spočívá v tom, že přijímač si zapamatuje polohu nastavení výchylek na všech kanálech ve chvíli zapnutí palubní části RC (připojení bat. k regulátoru), do této polohy uvede kormidla resp. zařízení připojená k vystupům přijímače při jakémkoli výpadku signálu. Díky způsobu nastavení brzdy dojde při výpadku signálu z vysílače k přepnutí motoru na plný plyn (neb s pákou plynu na max. byla palubní část RC zapnuta). Tohle zjištění mě stálo trochu krve na hrudi když jsem ladil základní nastavení výchylek kormidel modelu na stole, ve chvíli kdy jsem nastavení ukládal (zřejmě v ten okamžik vysílač nevysílá) se motor roztočil na maximum a model se samozřejmě vydal směrem na mne. I když dráhu k rozjezdu neměl moc dlouhou bolelo to. Jak z toho ven? S přijímačem nic neudělám, s regulátorem asi také ne. Takže nezbývá než buď riskovat a létat bez brzdy a nebo s brzdou a nastavit si volnoběžné otáčky.
 |
| climaporové díly modelu po nástřiku |
 |
| hotový model s provizorně upevněnou baterií |
 |
|
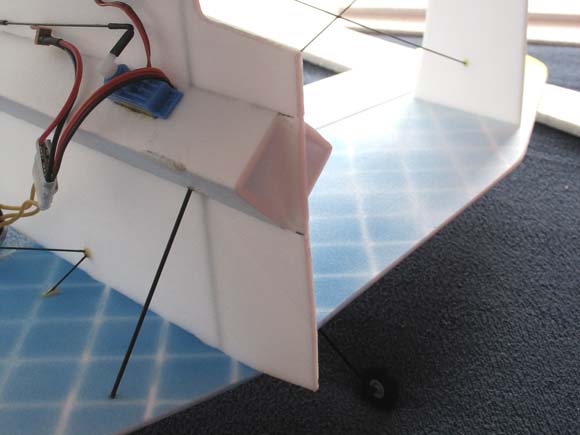
celkový pohled |
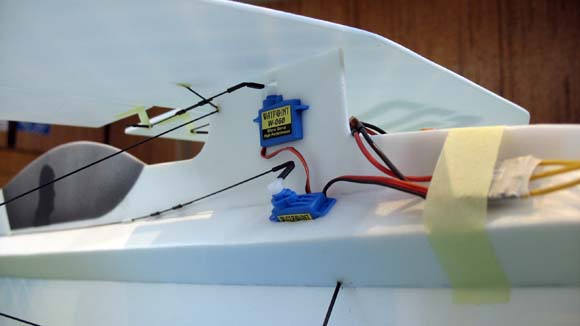 |
| "strojovna" náhonu křidélek a směrovky |
 |
| amputace pochroumaného čumáku |
 |
| nový čumák z epp |
| Informativně rozbor hmotnosti: | |
| všechny climaporové díly |
54g
|
| přijímač + regulátor + motor + vrtule SF 8/4,3 |
30g
|
| 3x servo waypoint |
20g
|
| povrchová úprava barvami Agama |
0g
|
| podvozek, táhla, izolepa, lepidlo |
11g |
| kompletně osazený model bez baterií |
115g
|
| baterie 2x LiPol360mAh |
25g
|